
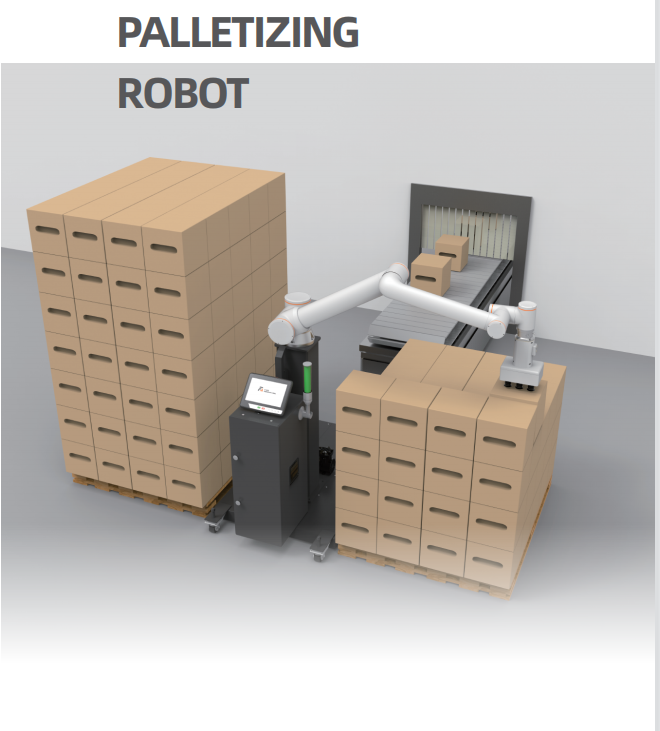
全自動パレタイジングロボット


- backpack
- 中国広東省仏山市
- 2024年
- 1000
✓ センサーを追加する必要はありません。
✓ 操作が簡単、プログラムも簡単
パレットジャッキやフォークリフトで使用可能
実行ツールの設定を終了します。
✓ 標準真空ホルダー
✓ 共通の標準エンドホルダー
✓ カスタマイズされたエンドクランプツール (特別品)
全自動パレタイジングロボット
✓ センサーを追加する必要はありません。
✓ 操作が簡単、プログラムも簡単
パレットジャッキやフォークリフトで使用可能
実行ツールの設定を終了します。
✓ 標準真空ホルダー
✓ 共通の標準エンドホルダー
✓ カスタマイズされたエンドクランプツール (特別品)



製品仕様:
| ガス源&注意; | 0.5~0.8Mpa(真空発生器) |
| 空気消費量&注意; | &注意;350~450nl/分 |
| 電源&注意; &注意; &注意; | AC220V 50Hz±10% |
| 最大消費電力 | 5KW |
| 装置の総重量&注意; | ≈350kg |
| カートンのサイズに合わせて調整する&注意; | &注意; ユーザーの要件に基づいて作成可能 |
| スタッキング方法&注意; &注意;&注意; | ユーザーの要件に基づいて作成可能 |
| 最大スタック高さ* | &注意;吊り上げ可能な最大積み重ね高さ&注意; &注意; &注意; &注意; &注意; &注意; &注意; &注意;&注意; 下げた高さは 2100mm (パレットを含む)。通常最大1600mm(パレット含む) |
| 最大パレットサイズ* | 1200mm×1200mm |
| 積み重ね可能なボックスの寸法*&注意; | 長さ(260-500)んん*幅(200-450) |
| 最大許容荷重 | 20kg |
| 最速のスタック速度 | 1分間に最大8箱まで積み重ね可能 |
| 作業半径 | 最大作業半径 1600mm |
| セキュリティ機能 | オプション: 安全格子、安全フェンス、安全誘導カーペット |
| IP等級&注意; | ロボットアームはIP54、グリッパーおよびその他の付属品はIP32準拠 |
| インターフェース&注意; | 緊急停止、安全保護、管理者モード、工場出荷時設定モードを含む複数の安全入出力をサポート |
| セキュリティ機能&注意;&注意; | 緊急停止機能、予約済み外部安全インターフェイス (I/O インターフェイス経由で制御可能) |
| インジケーターのステータス&注意; | 正常に電源が入っている場合、インジケーターライトは常に緑色です。電源がオフになると、インジケーターライトが消えます。 |
シンプルなパレタイジングソフトウェア
簡単 パレタイジング ソフトウェアにより、高度なロボット プログラミングの必要がなくなります。ユーザーが必要とするのは、次の 3 セットの重要な情報の入力だけです。
カートンボックスのサイズ (つまり、幅 x 長さ x 高さ)。パレットサイズ: パレット幅、パレット長さ、パレット高さ、ボックススタッキング高さ;コンベアサイズ:
コンベヤ高さ、コンベヤ位置決めインジケータ (コンベヤが所定の位置に配置されていることを確認するためのパレタイザ上のセンサー、スクリーン)
赤または緑のインジケータライトが表示されます)、この情報を使用して、システムはロボットの動きを自動的に計算して指示します。
パレット積みされた物のサイズ範囲

長さ1200
幅1200
高さ2550

パレタイジングロボットは、製品を一定の順序と方法で積み重ねるために使用される自動装置です。これらは工業生産の物流、倉庫保管、梱包の側面で一般的に使用されます。パレタイズロボットの使い方は以下の通りです。
1. 材料の準備: パレタイジングロボットを使用する前に、材料を準備する必要があります。これには、箱のマークと仕様が要件を満たしているかどうかの確認、材料が保管期限内であるかどうか、乾燥した、油や塵のない環境で保管されているかどうかの確認が含まれます。
2. 稼働前検査:パレタイジングロボットを稼働させる前に、マザーパレットの基礎がしっかりしているか、パレットが汚れていないか、油汚れや磨耗がないかを確認する必要があります。
3. ロボットの電源をオンにします。製造元が提供する操作マニュアルに従って、パレタイジング ロボットの電源をオンにします。すべてのケーブルと電源が接続されていることを確認してください。
4. プログラムの設定:段積みする製品とパレットのサイズに応じて、パレタイジングロボットのプログラムを設定します。これには通常、ロボットが掴む製品の高さ、幅、奥行きなどのパラメータの設定が含まれます。
5. 動作開始:パレタイジングロボットの作業エリアに製品を置き、スタートボタンを押します。パレタイジングロボットが製品を自動的に掴んでパレットに積み上げます。
6. 動作の監視: パレタイジングロボットの動作中、オペレータは装置の動作を注意深く監視する必要があります。異常を発見した場合は、ただちに非常停止ボタンを押し、保守員に点検・修理を連絡してください。
7. 操作の完了: パレタイジング ロボットの操作が完了したら、オペレーターは作業エリアからパレットを取り外し、新しいパレットを作業エリアに置き、次の操作に備える必要があります。
8. ロボットをシャットダウンします。すべての操作が完了したら、操作マニュアルの指示に従ってパレタイジング ロボットをシャットダウンし、すべての電源と接続ワイヤが切断されていることを確認します。






